Bei der DT-A handelt es sich um den Prototypen eines Motorrads mit Allradantrieb für den Einsatz als Reiseenduro oder bei Rallyes. Die DT-A wurde über einen Zeitraum von etwa 10 Jahren entwickelt. Bis auf wenige Serienbauteile wie beispielsweise Motor, Hinterrad einschließlich Schwinge und Bremsanlage, ist das Motorrad eine eigenständige
Konstruktion und Anfertigung. Zielsetzung des Konzeptes war es, für Motorräder jeder Leistungsklasse einen vollwertigen, zusätzlichen Vorderradantrieb bereitzustellen. Dazu musste der zu entwickelnde Vorderradantrieb in der Lage sein,
in jedem Geschwindigkeitsbereich ausreichend Leistung übertragen zu können. Es galt zu verhindern, dass das Fahrverhalten im ‚Normalbetrieb‘ negativ beeinflusst wird.

Entstanden ist ein Motorrad, das stark vom konventionellen Aufbau mit teleskopgabelgeführtem Vorderrad abweicht. Das Vorderrad ist bei der DT-A in einem Achsschenkel gelagert, über den auch der Antrieb herangeführt wird. Um alle Vorteile des Konzepts umzusetzen, mussten fast sämtliche Komponenten, beginnend beim Rahmen, neu konstruiert und/ oder neu angeordnet werden. So kann die DT-A das volle Potential bezüglich Leichtbau und Massenzentrierung ausschöpfen, das sich durch die Abkehr von der Teleskopgabel ergibt. Die Gewichtseinsparung gegenüber dem hier verwendeten Referenzmotorrad, der KTM 990 Adventure, beträgt ca. 40 kg

Erste Fahrversuche bestätigen die hervorragenden Fahrleistungen aufgrund der geringen Fahrzeugmasse. Dabei verhält sich die andersartige Vorderradführung sehr unauffällig, die Federung der vorderen Schwinge spricht sogar deutlich sensibler an als eine gewöhnliche Teleskopgabel.
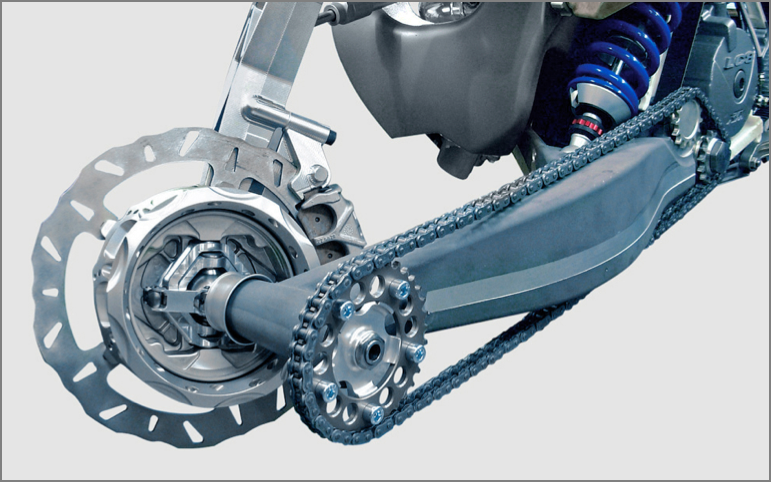
Die Vorderradführung
Das Vorderrad ist in einem Achsschenkel geführt. Die Lenkachse wird durch zwei Universalgelenke aufgespannt, wobei das erste zentral in der Radnabe sitzt und das zweite oberhalb des Vorderrades. Ersteres ist als eigens entwickeltes homokinetisches Gelenk ausgeführt, dessen Abtriebsseite fest mit dem lenkbaren Vorderrad verbunden ist.
Die Antriebsseite ist parallel zur Hinterradachse herausgeführt und in dem Achsschenkel gelagert. Sie ist über eine Kette und einen Riementrieb mit der Getriebeausgangswelle gekoppelt. Ein Freilauf im Antriebsstrang kuppelt den Antrieb des Vorderrades automatisch ein, sobald am Hinterrad 5% Schlupf auftreten, dass heißt unter normalen Fahrbedingungen, z.B. auf Asphalt, läuft das
Vorderrad antriebslos mit, erst bei einsetzendem Traktionsverlust schaltet der Antrieb zu.
Über einen Schalthebel am Lenker läßt sich der Antrieb auch dauerhaft trennen. Durch die stabile, umweglose und rein mechanische Kraftübertragung ist der Wirkungsgrad bei der DT-A sehr hoch und es gibt keine Verlustprobleme bei hohen Geschwindigkeiten / hoher Leistung.


Das Antriebsgelenk
Ein ‚naheliegendes‘, einfaches Kardangelenk wäre zur Übertragung der Antriebskräfte völlig ungeeignet, da mit zunehmendem Lenkeinschlag pulsierende Drehmomentschwankungen entstünden, die auf Antrieb und Lenkung zurückwirken. Auch eine Ausführung ähnlich einer PKW-Gelenkwelle würde aufgrund der starken Reibung im Gelenk ein rückstellendes Moment auf die Lenkung erzeugen.
Bei der DT-A erfolgt die Kraftübertragung auf das gelenkte Vorderrad über ein eigens entwickeltes homokinetisches Gelenk, welches nahezu reibungsfrei ausgeführt ist.
Erst diese Entwicklung macht es möglich, dass selbst bei hohen Lenkeinschlagwinkeln (ausgeführt bis 35°) keine Störungen entstehen, die auf Antrieb und Lenkung zurückwirken.
Dieses homokinetische Gelenk lässt die rückwirkungsfreie Übertragung sehr hoher Leistungen bei niedrigem Gewicht zu, die ungefederten Massen sind nahezu gleich einem
telegabelgeführten Vorderrad – die gelenkten Massen sind sogar deutlich reduziert.
Eckdaten des Prototyps „Projekt DT-A“
Motor
KTM LC8 990 Adventure 74kW (100PS)
Rahmen
Gitterrohrrahmen auf spezieller Schweißlehre aufgebau
Tanks
Aramid Honeycomb-Sandwich
Verkleidungsteile, Sitzbankträger
CfK Honeycomb-Sandwich
Vordere Radaufhängung
Achsschenkelgeführtes Vorderrad
Oberer Längslenker
CfK-Unidirektionalgelege
Achsschenkel
warmausgelagerte Al-Gußlegierung nach Luftfahrtnorm
Maße und Gewichte
Gesamtgewicht fahrfertig ohne Kraftstoff
170 kg
Ungefederte Massen, Vorderrad, rotierend
12 kg
Ungefederte Massen, Vorderrad, nicht rotierend
4,8 kg
Tankinhalt
27 l in 3 Tanks
Federweg vo / hi
280 mm / 280 mm
Lenkkopfwinkel/ Nachlauf
einstellbar
Sitzhöhe
1000 mm